国立大学法人北海道国立大学機構の「伴走車両の運転支援装置、運転支援方法及びプログラム」(特開2026-67020)です。
<背景技術(口語風にアレンジしています。)>
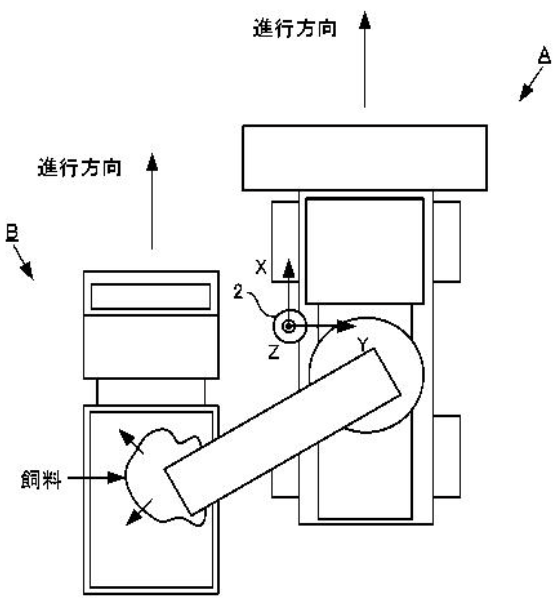
牧草などの飼料作物を収穫する際には、走行しながら作物を刈り取り、刈り取った草を後方へ飛ばすハーベスタと、その横を走って収穫物を受け取る伴走車両を組み合わせた方法が、北海道の酪農現場を中心に広く使われています。
伴走車両の運転は、ハーベスタとの距離を目で確認しながら行う必要があり、常に高い注意が求められます。
ハーベスタは高価で、複数の農家が共同で使うことも多いため、万が一接触して故障すると、その影響は現場全体に及んでしまいます。
<課題を解決するための手段(口語風にアレンジしています。)>
そこで、伴走車両の現在位置や進行方向から推定される位置が、ハーベスタに接触するおそれのあるエリアに入った場合に、運転手へ警告を出す仕組みとしました。
<投稿者のコメント>
さすが、北海道大学ですね。
大地の香がするような発明です。
実施例では、ニューラルネットワークも使われています。
インタビューを妄想すると、
酪農家さん
「ぶつけちゃったら大変だからさ、そこは気つかうんだわ。」
牛さん
「モ~。(あたしのごはんだから、ちゃんと頼むっしょ)」
大学の人
「うん、これなら大丈夫だよ。」
牛さん
「モ、モ~。(ありがとう><)」
ガガガガガ・・・
<想定される応用分野>
1.農業分野
ハーベスタと並走する収穫トラック。
2.除雪・道路維持管理分野
ロータリー除雪車と並走する雪受けトラック。
3.建設・土木分野
アスファルトフィニッシャと並走するダンプトラック。
4.鉱山・採掘分野
採掘機と並走するダンプトラック。
5.港湾・物流分野
荷役車両と並走する搬送トラック。
6.工場・プラント内物流分野
搬送車両と並走する補助車両。
7.自動運転・先進運転支援分野
先行車両に隣接して走行する追従車両。
詳しくは、コチラをご確認ください。
https://www.j-platpat.inpit.go.jp/c1801/PU/JP-2026-067020/11/ja
ご興味のある方は、北海道大学へお問い合わせください。
https://www.hokudai.ac.jp